
Hybrid Continuum Robot Designs and Architectures for Healthcare Applications
INDUSTRY SOLUTIONTECHNICAL INSIGHTPUBLICATION
ReAMA Lab
3/3/20261 min read
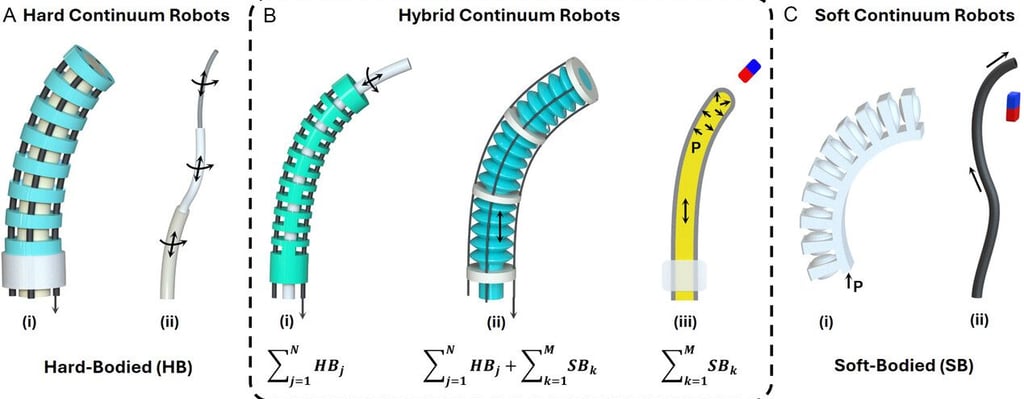
I am pleased to announce our latest publication in Advanced Robotics Research journal: "Hybrid Continuum Robot Designs and Architectures for Healthcare Applications."
We addressed the challenge of modeling the interaction between surgical tools and soft tissue, which is a computationally expensive matter but vital for robotic surgery safety.
We developed a reduced-order model that accurately simulates the mechanics of pressurized intestinal segments. This allows for high-fidelity physics simulations that are efficient enough for real-time surgical training and device validation. By bridging the gap between complex biomechanics and efficient multibody dynamics, we are enabling safer, more predictable robotic interventions.
We present a new method for modeling the pressurized intestinal segment using multibody dynamics, which impacts
Precision: Better modeling of tool-tissue interaction.
Speed: Reduced-order modeling enables faster-than-real-time simulation.
Safety: Validating surgical robotic paths in a virtual "Bio-Digital Twin" environment.
Special thanks to the team for pushing the boundaries of what’s possible in numerical methods for bioengineering (James Chandler, Pietro Valdastri, Muhammad Abdullah Khalid).
Read the full article: https://advanced.onlinelibrary.wiley.com/doi/10.1002/adrr.202500177
Contact
Reach out for collaborations or questions.
Phone
manish.chauhan[at]york.ac.uk
+44 (0) 1904 32 2361
© 2025. All rights reserved.