From Theory to Touch: Empowering Students through Soft Robotic Rehabilitation
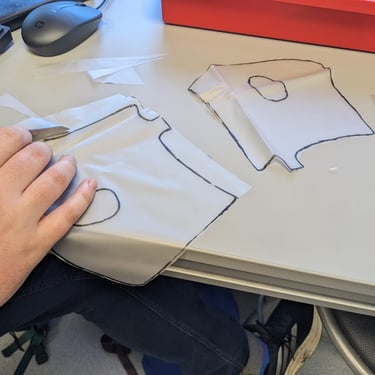
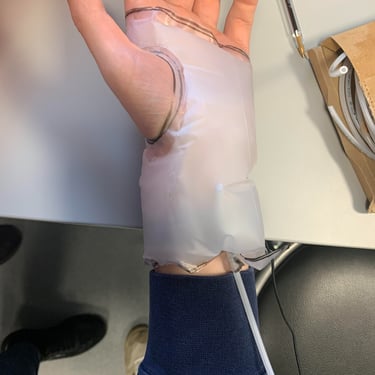
The Challenge: Engineering for the Human Interface Engineering for healthcare requires more than just technical precision; it requires empathy for the biological interface. This month, I challenged my students to step away from traditional rigid robotics and explore the world of Soft Actuation. The goal was simple but ambitious: design and prototype a functional soft robotic brace for hand rehabilitation.
ACADEMIC LEADERSHIPREAMATECHTEACHING